CÔNG TY TNHH SẢN XUẤT-THƯƠNG MẠI-DỊCH VỤ KỸ THUẬT HÒA BÌNH



INTECO
|
Mô đun Servo được thiết kế đặc biệt cho nghiên cứu và kiểm chứng thực tiễn các phương pháp điều khiển cơ bản và nâng cao. Chúng bao gồm minh chứng các hệ số biến thiên tiêu biểu như ma sát, dao động tắt dần và quán tính cũng như nhiều phương pháp điều khiển vị trí/tốc độ trong phạm vi từ PID đến LQ và điều khiển tối ưu thời gian. |
|
 |
Phần mềm cho gối đỡ từ được thiết kế riêng cho hai nền tảng phần cứng: FPGA và Thời gian thực. FPGA hỗ trợ các phép đo các cảm biến sau đây: - Vị trí của trục so với các gối đỡ từ - Vị trí góc của trục FPGA cũng phát ra sáu tín hiệu PWM để điều khiển các chấp hành sau: - Bốn cuộn dây của gối đỡ - Động cơ DC lái trục - Nhiễu loạn (một sự thay đổi trong sự thiếu cân bằng trục) |
|
Bộ thí nghiệm Xe hai bánh Dịch chuyển Tự cân bằng Xe hai bánh Dịch chuyển Tự cân bằng (hay không ổn định) (Two-Wheeled Unstable Transporter) là một ví dụ về hệ thống điều khiển phức tạp. Nó bắt buộc phải thỏa mãn đồng thời hai giải thuật điều khiển. Thứ nhất là một bộ ổn định chủ (Master Regulator). Nó chịu trách nhiệm duy trì xe dịch chuyển trong một điểm cân bằng không ổn định phía trên. Thứ hai là phải đi theo quỹ đạo được xác định trước của xe. Các bộ ổn định toàn phương tuyến tính ở nhiều dạng khác nhau phục vụ cả hai giải thuật điều khiển. |
|
 |
Bộ thí nghiệm Hệ thống Phanh Không Khóa ABS Các hệ thống phanh không khóa được thiết kế để tối ưu tính hiệu quả trong khi vẫn duy trì khả năng điều khiển của xe. Mô hình ABS được lái bởi một động cơ DC phẳng được lái từ PC. Có ba bộ lập mã góc quay (Encoder) đo lường các góc quay của hai bánh xe và góc nâng của hệ thống giảm xóc bánh xe. |
 |
Bộ thí nghiệm Hệ thống Xe dịch chuyển & Con lắc ngược Hệ thống Xe dịch chuyển & Con lắc ngược bao gồm một con lắc (hay cực) được gắn trên xe dịch chuyển theo cách mà con lắc có thể quay tự do chỉ trong mặt phẳng dọc. Xe dịch chuyển được lái bởi một động cơ. Để quay và để cân bằng con lắc, xe dịch chuyển được đẩy tới lui trên một thanh ray có chiều dài giới hạn. |
 |
Hệ thống đa bồn bao gồm nhiều bồn tách biệt được gắn các van xả. Hai trong các bồn có các phần mặt cắt thay đổi. Chúng đại diện cho tính phi tuyến đi vào hệ thống. Một máy bơm tốc độ thay đổi được sử dụng để làm đầy bồn trên. Chất lỏng chảy ra khỏi bồn do trọng lực. Các van bồn hoạt động như các điện trở dòng chảy. Độ mở của van được điều khiển và được sử dụng để làm thay đổi đặc tính dòng chảy ra. Mỗi bồn được trang bị với một cảm biến mức.
|
 |
Bộ thí nghiệm Hệ thống Nâng bi trong Từ trường Hệ thống Nâng bi trong Từ trường (MLS) là một hệ thống động không ma sát biến thiên thời gian không ổn định, vòng hở, phi tuyến. Nguyên lý hoạt động cơ bản của MLS là áp một điện áp vào một nam châm điện để giữ quả cầu (viên bi) sắt từ lên xuống. Hơn thế nữa, quả cầu có thể đi theo một giá trị vị trí mong muốn thay đổi theo thời gian. Dòng điện cuộn dây được đo để khám phá sự nhận dạng và các chiến thuật điều khiển đa vòng hoặc phi tuyến. Để nâng hạ quả cầu một bộ điều khiển thời gian thực được cần đến. Tầng cân bằng của hai lực (trong lực và điện từ) được duy trì bởi bộ điều khiển để giữ quả cầu ở một khoảng cách mong muốn so với nam châm. |
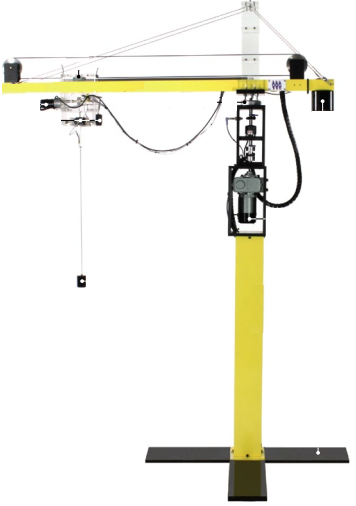 |
Mô hình thí nghiệm 3D của cẩu tháp phù hợp với cấu trúc hiện đại của các cẩu cho sự kết hợp tốt nhất của độ cao và khả năng nâng hạ. Mô hình thí nghiệm là một hệ thống MIMO có tính phi tuyến cao được trang bị bằng một hệ thống các cảm biến được thiết kế dành riêng - bộ đo góc 2D độc nhất. |
 |
Mô hình 3D của cẩu công nghiệp là một hệ thống MIMO phi tuyến cao được trang bị một hệ thống các cảm biến đo góc 2D được thiết kế riêng. Hệ thống được tích hợp hoàn toàn với MATLAB/Simulink và hoạt động trong thời gian thực. |
 |
Bộ thí nghiệm Hệ thống Động lực học Hàng không Hai Rotor Hệ thống Động lực học Hàng không Hai Rotor (TRAS) là một thiết lập thí nghiệm được thiết kế cho các thí nghiệm điều khiển. Nó có diện mạo trông giống trực thăng. Dưới góc độ điều khiển, nó minh họa cho một hệ thống phi tuyền bậc cao với các phép ghép tương hỗ đáng kể. |
|
|
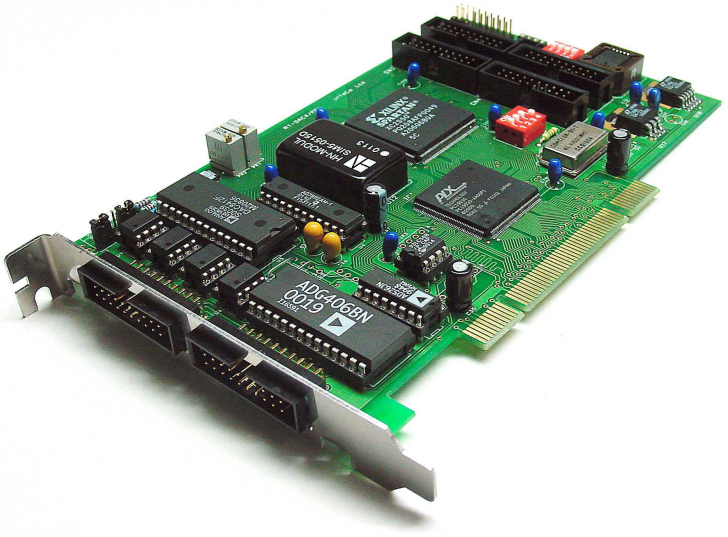
Bộ thí nghiệm Giao tiếp I/O Quá trình Các bo I/O quá trình giao tiếp qua USB hoặc PCI được trang bị một mạch FPGA được kết nối đến tất cả các tín hiệu I/O. Chíp FPGA là bộ điều khiển chủ của các tài nguyên bo. Chúng có thể hoạt động như các bo I/O thông thường nhưng cũng có các chức năng của bo được thực hiện bằng phần cứng có thể thay đổi được nhờ sự cấu hình của mạch FPGA có thể được thay đổi. Sự khác biệt giữa các bo thông thường và bo có quyền vô hạn là có thể cấu hình lại chứ không chỉ là có thể lập trình được. |